
To get everything talking together I’m going to need something to sit in the middle, and provide all the processing power. On the recommendation of my supervisor I had a look at the arduino boards. The arduino boards are based on Atmel processors in the middle with a boot loader per-installed to allow the uploading of programs straight onto the board from USB.
There are many variants of the processor available, all with more than enough programming power for what I will be doing, the important thing for me to consider was which input and output interfaces I’d need for my quad rotor. The key one that I decided I’d need where,
- Serial – to provide my communication link to the computer
- I2C – this would provide all the communications between my main board and any sensors that would be required
- 4 x PWM outputs – these would be used to control each of the motors that will be on board the Quad Rotor
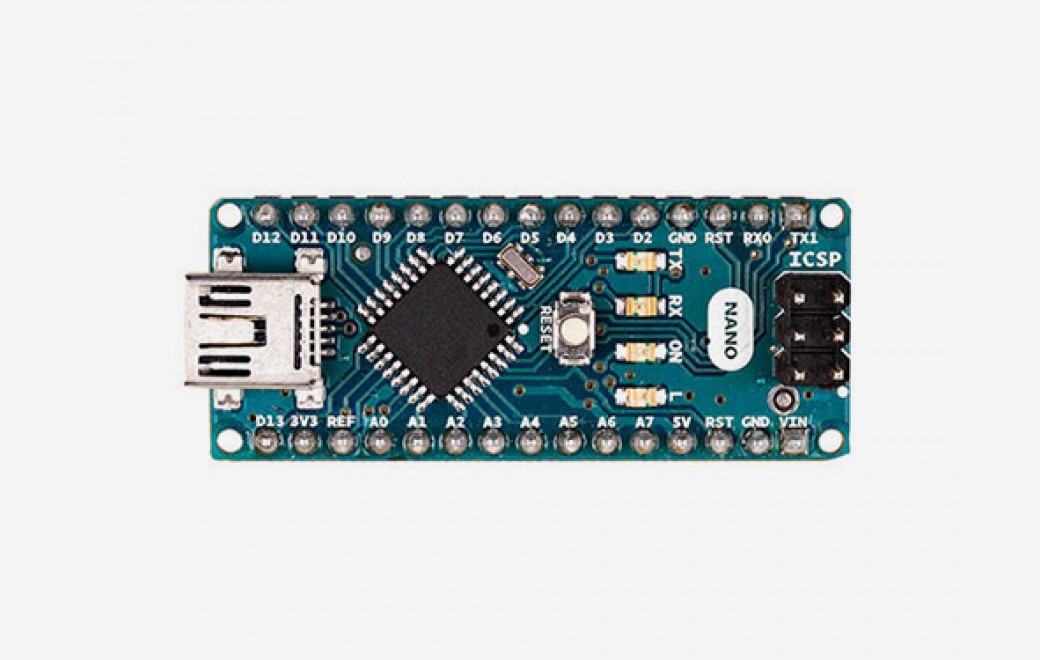
After considering all these factors, the next thing to consider is ease of integration and the size and weight limitations. I made the decision to purchase an Arduino Nano board, this provides all the I/O pins that I require in a very small package. This board also has the voltage regulators that I’ll require for my circuit, reducing the component count on the main board.